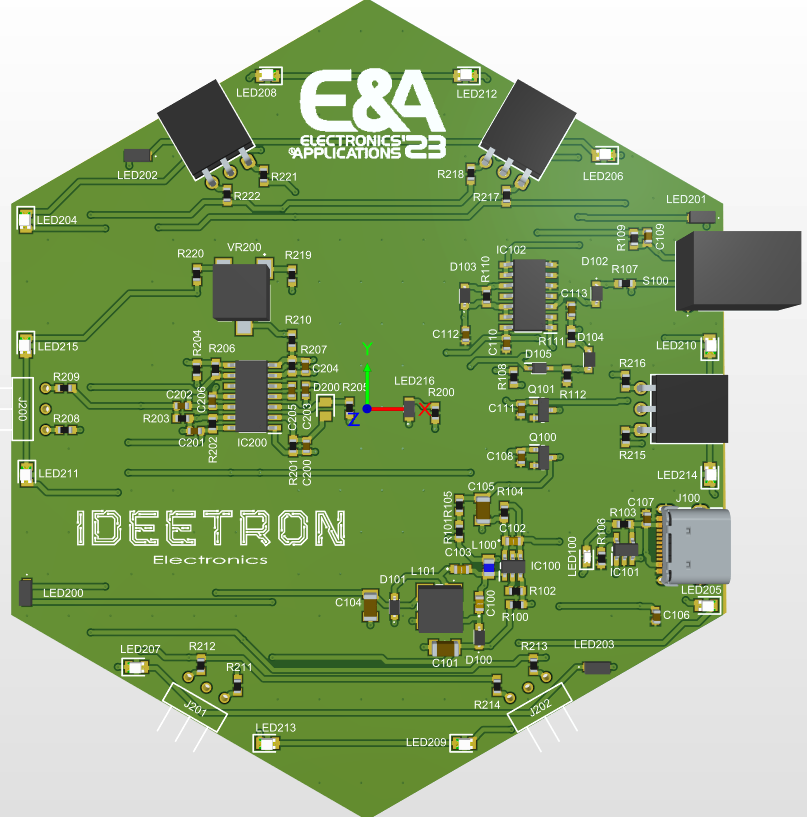
PCB-ontwerp voor E&A-beursgadget Het PCB-ontwerp voor de E&A-beursgadget is zo goed als klaar. De ontwerpers van Ideetron BV, de bedenkers van de gadget, zetten op dit moment de … Lees meer